Grundidee
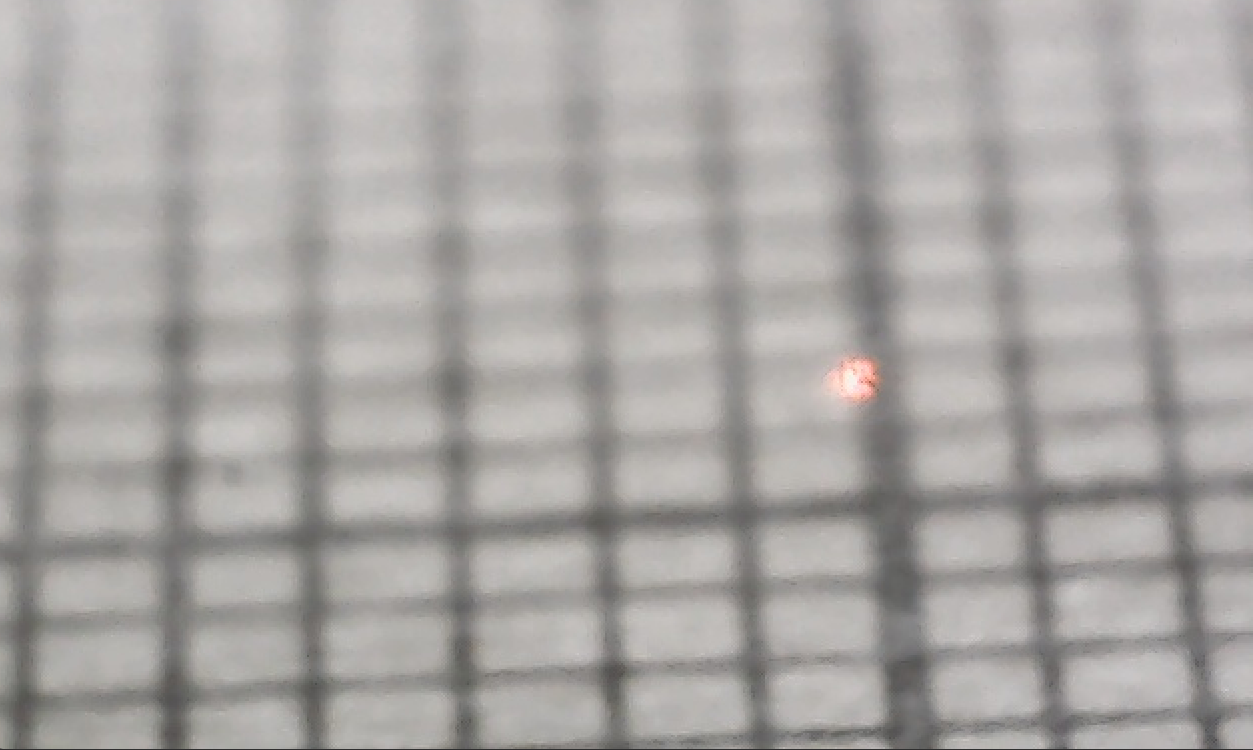
Der „analoge“ bzw. klassische Ansatz nutzt die physikalische Geometrie der Laser-Triangulation: Der Pilot-Laser erzeugt einen Punkt auf dem Werkstück, der aus einem definierten Winkel von einer Kamera aufgenommen wird. Verschiebt sich die Höhe des Werkstücks, verschiebt sich die Position des Laserpunktes im Kamerabild. Aus dieser Punktposition kann der Abstand berechnet werden.
Im Gegensatz zum datengetriebenen Ansatz basiert die Auswertung hier auf nachvollziehbaren Schritten: Punkt im Bild lokalisieren → Pixelposition bestimmen → über Kalibrierung/Geometrie in einen Abstand umrechnen.
Bildverarbeitung (klassisch)
Die klassische Bildverarbeitung ist der Schlüssel zu einer robusten Messung. Hierbei wird versucht, den Laserpunkt möglichst exakt vom Hintergrund zu trennen.

Geometrische Auswertung
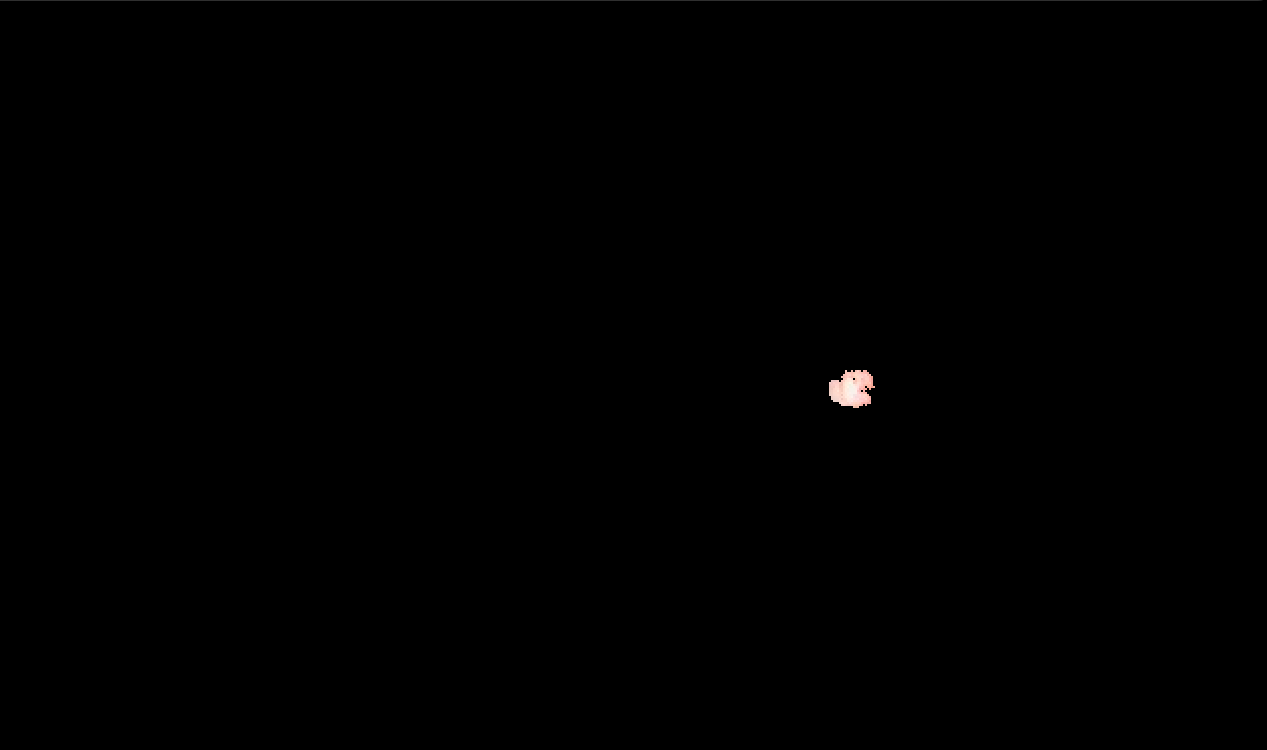
Bei der klassischen Bildverarbeitung wird zuerst aus dem Originalbild der Laserpunkt isoliert. Das passiert, indem das Bild zuerst vom RGB-Farbraum (Aufnahmeformat) in den HSV-Farbraum konvertiert wird, da dieser robuster gegenüber Helligkeitsschwankungen ist.
Anschließend werden alle Werte, die außerhalb des definierten Farbbereichs des Lasers liegen, maskiert (auf Schwarz gesetzt). Übrig bleibt im Idealfall nur die Region des Laserpunkts.
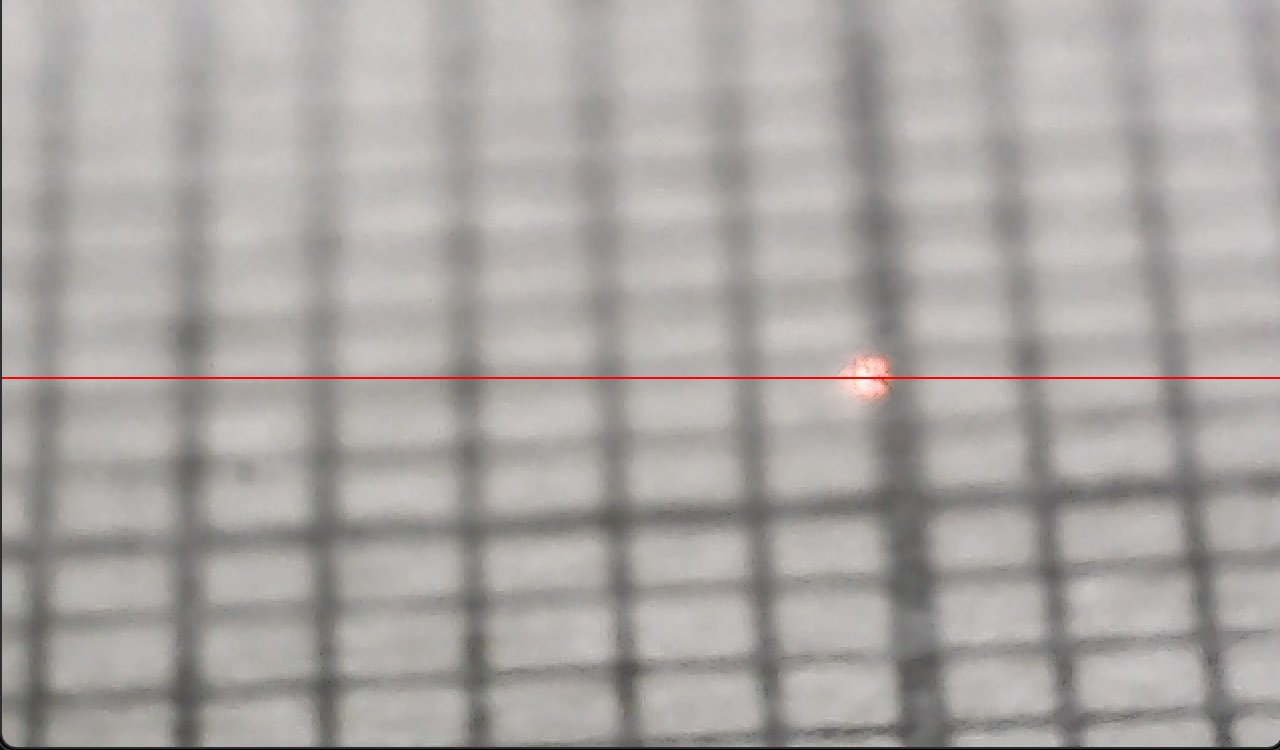
Vom Bild zum Messwert
Um die exakte Position zu bestimmen, werden die Pixelwerte der maskierten Zeilen aufaddiert. Der Punkt mit der höchsten Helligkeitssumme (Peak) wird als y-Position des Lasers im Bild definiert.
Dieser Pixel-Wert (y) wird anschließend in ein Polynom eingespeist. Dieses Polynom fungiert als Transferfunktion: Es rechnet die Pixelposition in die physikalische Höhe (in mm) um.
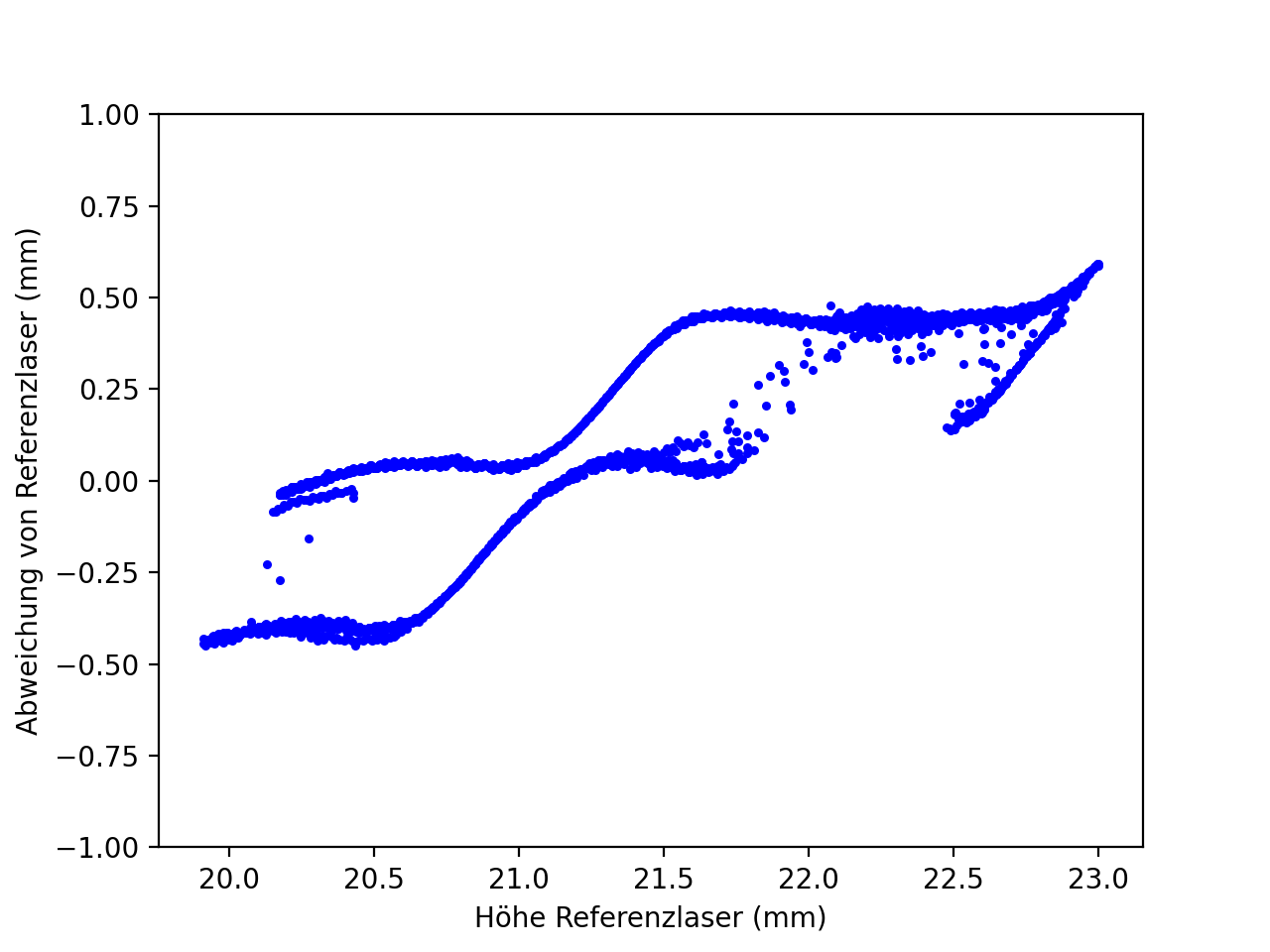
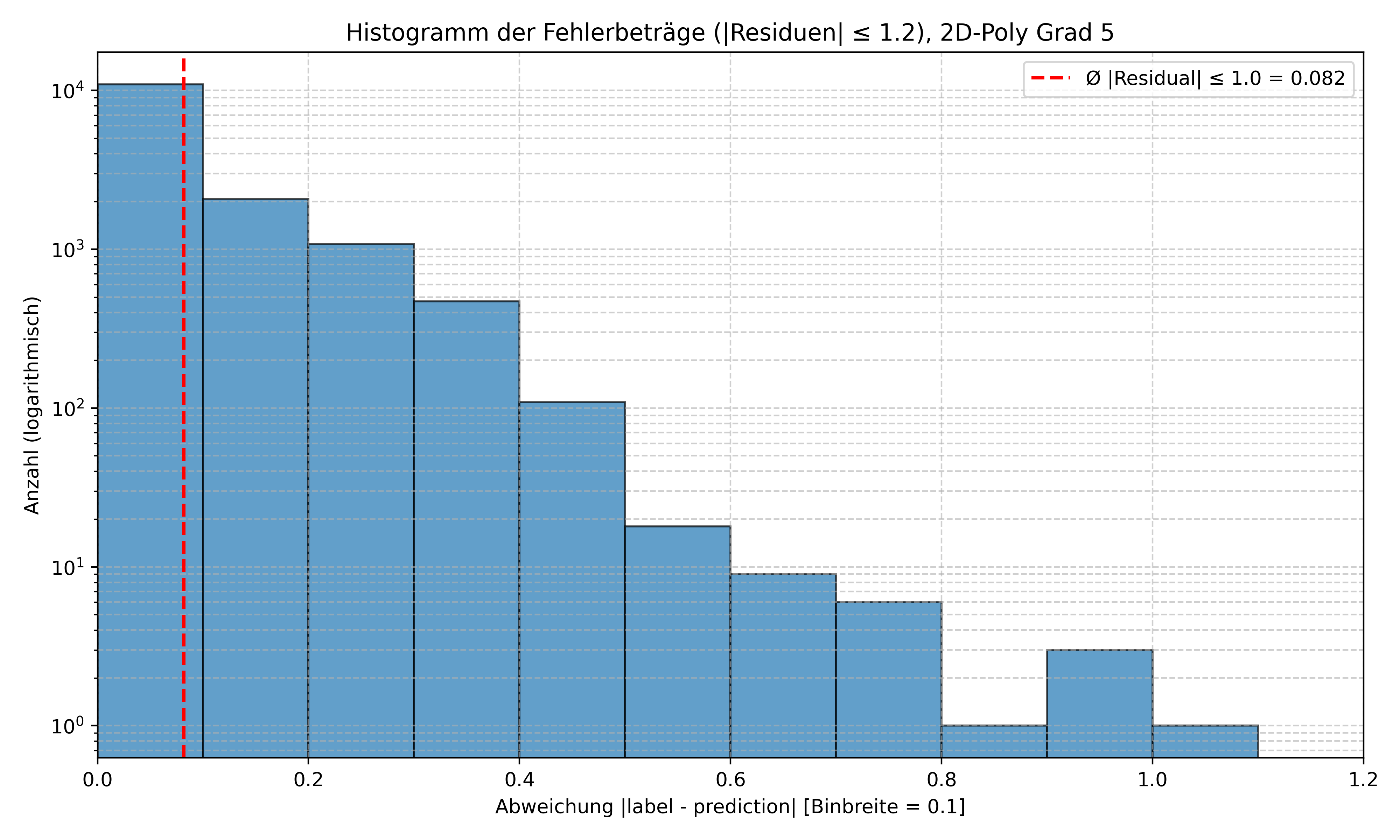
Validierung & Fehleranalyse
Um die Genauigkeit des Polynom-Fits zu überprüfen, werden die berechneten Höhen mit den Daten des Referenzlasers verglichen.