Grundidee
Der KI-Ansatz verfolgt das Ziel, den Abstand zwischen Kamera und Werkstück direkt aus dem Kamerabild des Laserpunktes zu bestimmen. Anstatt geometrische Zusammenhänge explizit zu modellieren, soll ein neuronales Netz die Abbildung „Bild → Abstand“ selbstständig erlernen.
Dazu werden Kamerabilder des Laserpunktes mit bekannten Referenz-Abständen kombiniert und als Trainingsdaten verwendet. Das neuronale Netz lernt, relevante Bildmerkmale zu extrahieren und daraus einen numerischen Abstandswert vorherzusagen.
Konzept des KI-Ansatzes
Eingabedaten
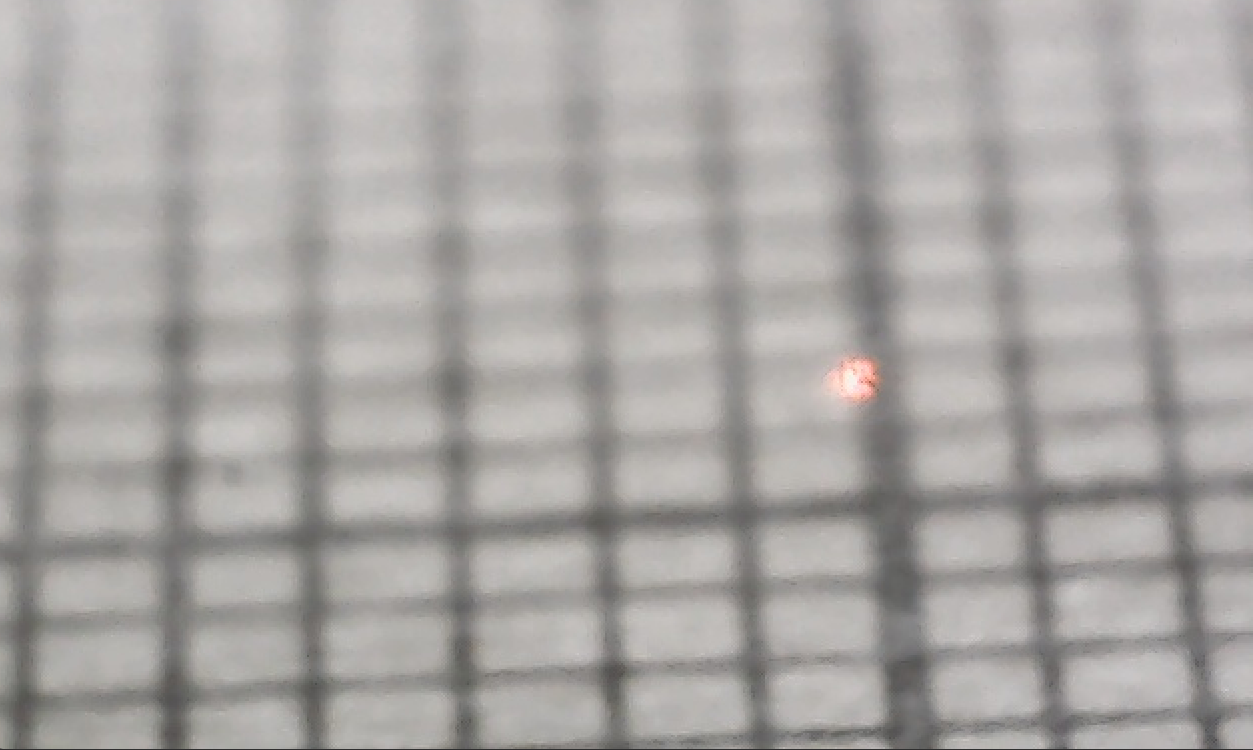
RGB-Kamerabilder des Laserpunktes auf dem Werkstück. Sie enthalten Informationen über die Position des reflektierten Laserlichts.
Neuronales Netz
Ein Convolutional Neural Network (CNN) verarbeitet die Bilddaten, extrahiert Merkmale und reduziert diese auf einen einzelnen Regressionswert.
Ausgabe
Das Netz gibt einen normierten Höhen- bzw. Abstandswert aus, der anschließend wieder in physikalische Einheiten (z. B. Millimeter) umgerechnet wird.
Ergebnisse aus der Praxis
Die folgenden Abbildungen zeigen exemplarisch ein typisches Eingabebild sowie die statistische Auswertung der Vorhersagefehler des KI-Ansatzes.
Das Kamerabild verdeutlicht reale Randbedingungen wie Oberflächenstruktur, Rasterung und Reflexionen, unter denen der Laserpunkt erkannt werden muss. Diese Einflüsse wirken sich direkt auf die Stabilität der KI-Vorhersagen aus.
Beispiel & Fehlerauswertung
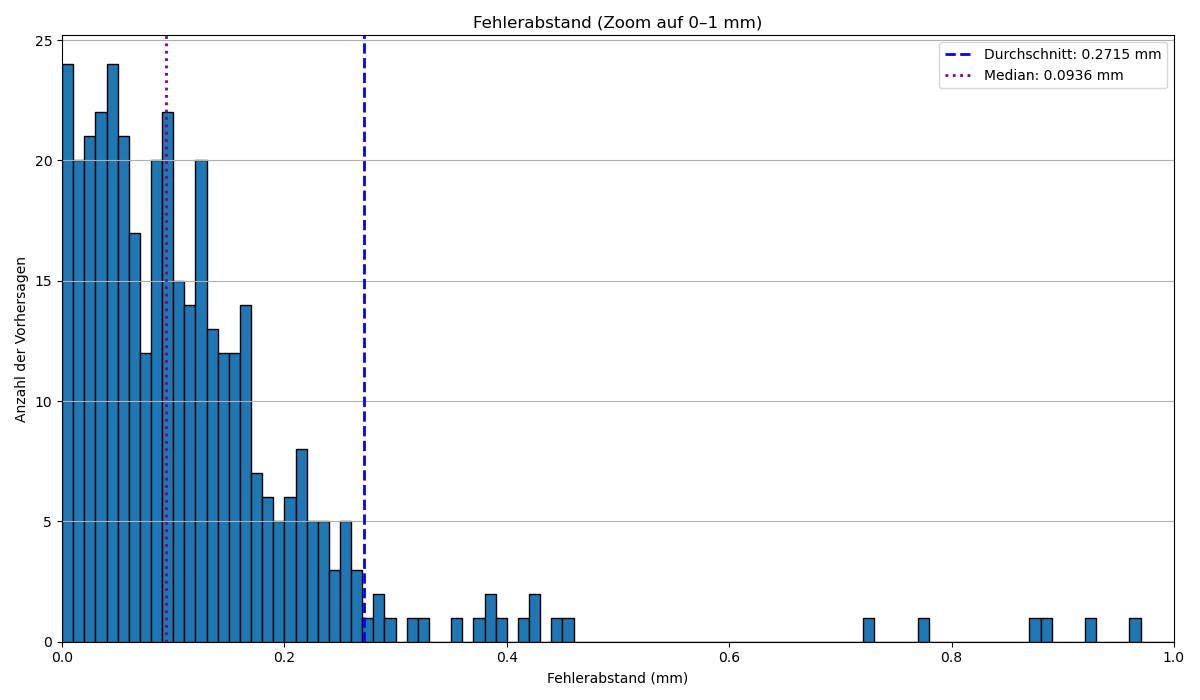
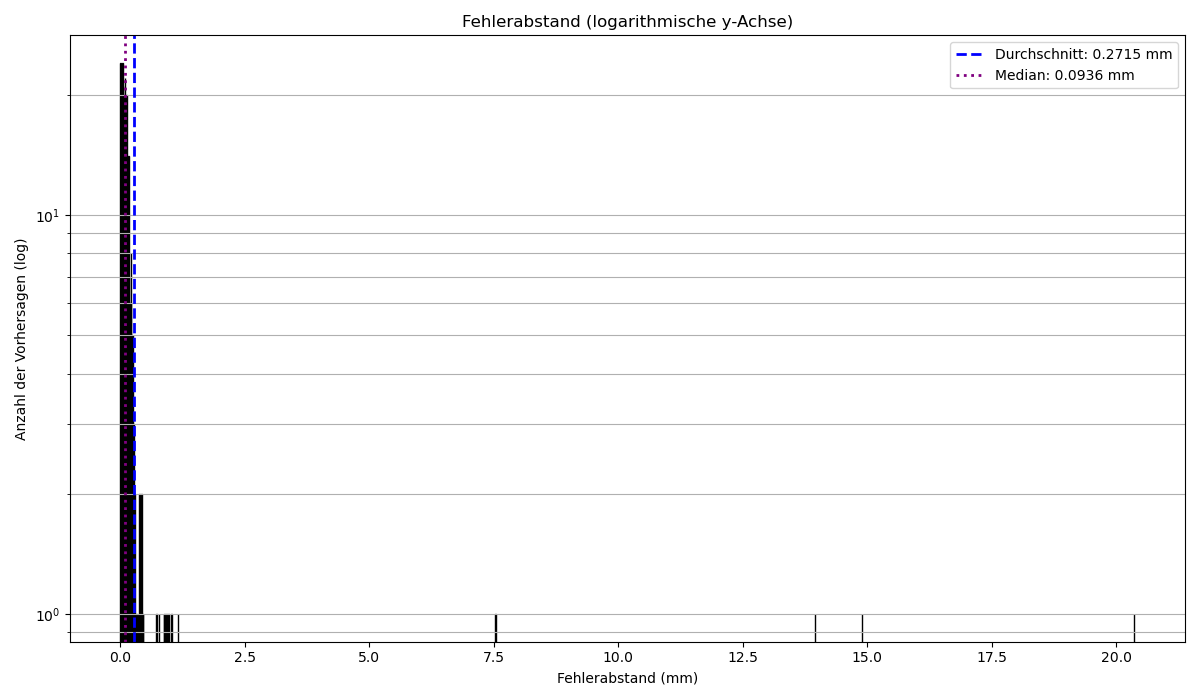
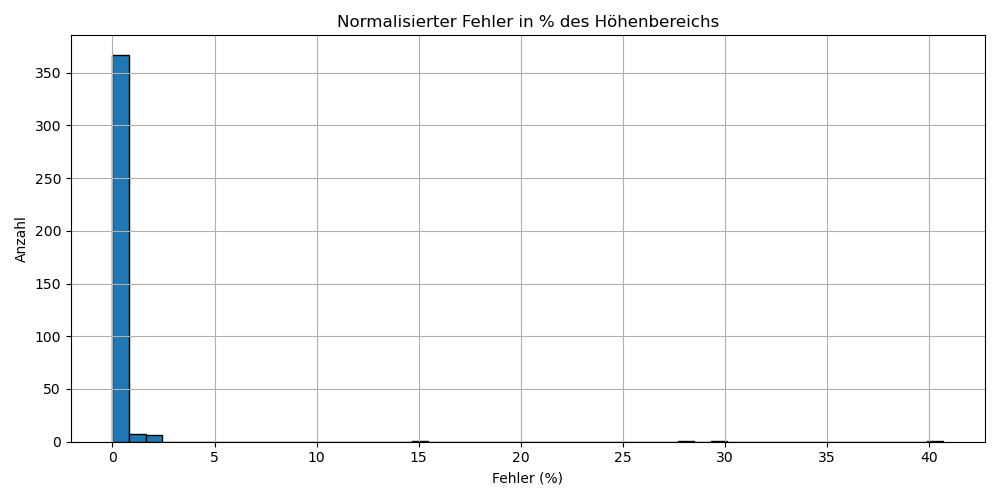
Obwohl der KI-Ansatz in der Theorie sehr vielversprechend erschien, funktionierte er in der Praxis nicht so zuverlässig und genau wie erhofft. Aufgrund der auftretenden Streuungen und Ausreißer wurde entschieden, den Fokus auf den klassischen, geometrisch begründeten Auswerteweg zu legen.